Note
Go to the end to download the full example code
Block-sparse reductions
This script showcases the use of the optional ranges argument to compute block-sparse reductions with sub-quadratic time complexity.
Setup
Standard imports:
import time
import numpy as np
import torch
from matplotlib import pyplot as plt
from pykeops.torch import LazyTensor
nump = lambda t: t.cpu().numpy()
use_cuda = torch.cuda.is_available()
# dtype = torch.cuda.FloatTensor if use_cuda else torch.FloatTensor
device = torch.device("cuda" if use_cuda else "cpu")
dtype = torch.float32 # Standard float type for both CPU/GPU
Define our dataset: two point clouds on the unit square.
M, N = (5000, 5000) if use_cuda else (2000, 2000)
t = torch.linspace(0, 2 * np.pi, M + 1)[:-1]
x = torch.stack((0.4 + 0.4 * (t / 7) * t.cos(), 0.5 + 0.3 * t.sin()), 1)
x = x + 0.01 * torch.randn(x.shape)
x = x.to(device=device, dtype=dtype) # Replace .type(dtype)
y = torch.randn(N, 2, device=device, dtype=dtype)
y = y / 10 + torch.tensor([0.6, 0.6], device=device, dtype=dtype)
Computing a block-sparse reduction
On the GPU, contiguous memory accesses are key to high performances.
To enable the implementation of algorithms with sub-quadratic time complexity
under this constraint, KeOps provides access to
block-sparse reduction routines through the optional
ranges argument, which is supported by torch.Genred
and all its children.
Pre-processing
To leverage this feature through the pykeops.torch API,
the first step is to clusterize your data
into groups which should neither be too small (performances on clusters
with less than ~200 points each are suboptimal)
nor too many (the from_matrix()
pre-processor can become a bottleneck when working with >2,000 clusters
per point cloud).
In this tutorial, we use the grid_cluster()
routine which simply groups points into cubic bins of arbitrary size:
from pykeops.torch.cluster import grid_cluster
eps = 0.05 # Size of our square bins
if use_cuda:
torch.cuda.synchronize()
Start = time.time()
start = time.time()
x_labels = grid_cluster(x.cpu(), eps).to(
device
) # Cluster on CPU but move back to device
y_labels = grid_cluster(y.cpu(), eps).to(device)
if use_cuda:
torch.cuda.synchronize()
end = time.time()
print("Perform clustering : {:.4f}s".format(end - start))
Perform clustering : 0.0013s
Once (integer) cluster labels have been computed, we can compute the centroids and memory footprint of each class:
from pykeops.torch.cluster import cluster_ranges_centroids
# Compute one range and centroid per class:
start = time.time()
x_ranges, x_centroids, _ = cluster_ranges_centroids(x, x_labels)
y_ranges, y_centroids, _ = cluster_ranges_centroids(y, y_labels)
if use_cuda:
torch.cuda.synchronize()
end = time.time()
print("Compute ranges+centroids : {:.4f}s".format(end - start))
Compute ranges+centroids : 0.0035s
Finally, we can sort our points according to their labels, making sure that all clusters are stored contiguously in memory:
from pykeops.torch.cluster import sort_clusters
start = time.time()
x, x_labels = sort_clusters(x, x_labels)
y, y_labels = sort_clusters(y, y_labels)
if use_cuda:
torch.cuda.synchronize()
end = time.time()
print("Sort the points : {:.4f}s".format(end - start))
Sort the points : 0.0133s
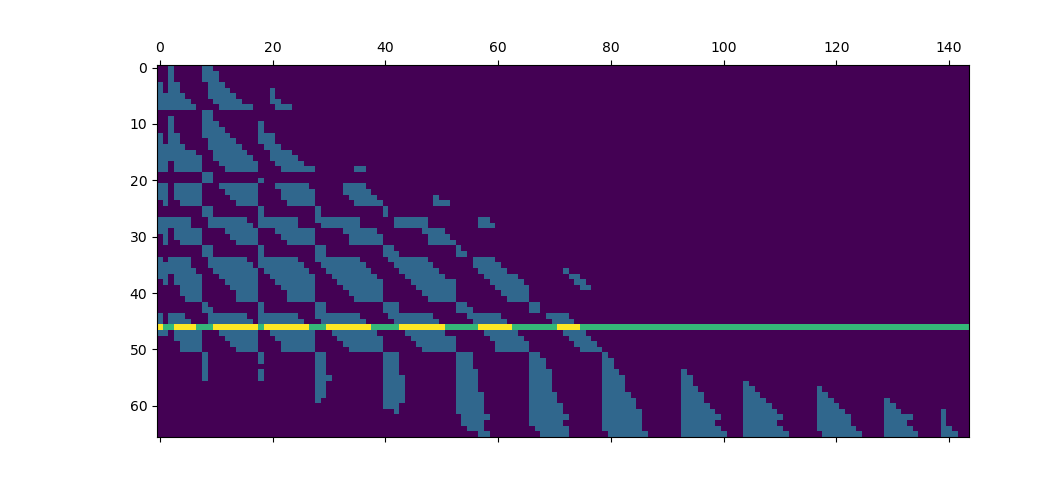
Cluster-Cluster binary mask
The key idea behind KeOps’s block-sparsity mode is that as soon as data points are sorted, we can manage the reduction scheme through a small, coarse boolean mask whose values encode whether or not we should perform computations at a finer scale.
In this example, we compute a simple Gaussian convolution of radius \(\sigma\) and decide to skip points-to-points interactions between blocks whose centroids are further apart than \(4\sigma\), as \(\exp(- (4\sigma)^2 / 2\sigma^2 ) = e^{-8} \ll 1\), with 99% of the mass of a Gaussian kernel located in the \(3\sigma\) range.
sigma = 0.05 # Characteristic length of interaction
start = time.time()
# Compute a coarse Boolean mask:
D = ((x_centroids[:, None, :] - y_centroids[None, :, :]) ** 2).sum(2)
keep = D < (4 * sigma) ** 2
To turn this mask into a set of integer Tensors which
is more palatable to KeOps’s low-level CUDA API,
we then use the from_matrix
routine…
from pykeops.torch.cluster import from_matrix
ranges_ij = from_matrix(x_ranges, y_ranges, keep)
if use_cuda:
torch.cuda.synchronize()
end = time.time()
print("Process the ranges : {:.4f}s".format(end - start))
if use_cuda:
torch.cuda.synchronize()
End = time.time()
t_cluster = End - Start
print("Total time (synchronized): {:.4f}s".format(End - Start))
print("")
Process the ranges : 0.0022s
Total time (synchronized): 0.0215s
And we’re done: here is the ranges argument that can be fed to the KeOps reduction routines! For large point clouds, we can expect a speed-up that is directly proportional to the ratio of mass between our fine binary mask (encoded in ranges_ij) and the full, N-by-M kernel matrix:
areas = (x_ranges[:, 1] - x_ranges[:, 0])[:, None] * (y_ranges[:, 1] - y_ranges[:, 0])[
None, :
]
total_area = areas.sum().item() # should be equal to N*M
sparse_area = areas[keep].sum().item()
print(
"We keep {:.2e}/{:.2e} = {:2d}% of the original kernel matrix.".format(
sparse_area, total_area, int(100 * sparse_area / total_area)
)
)
print("")
We keep 3.52e+06/2.50e+07 = 14% of the original kernel matrix.
Benchmark a block-sparse Gaussian convolution
Define a Gaussian kernel matrix from 2d point clouds:
x_, y_ = x / sigma, y / sigma
x_i, y_j = LazyTensor(x_[:, None, :]), LazyTensor(y_[None, :, :])
D_ij = ((x_i - y_j) ** 2).sum(dim=2) # Symbolic (M,N,1) matrix of squared distances
K = (-D_ij / 2).exp() # Symbolic (M,N,1) Gaussian kernel matrix
And create a random signal supported by the points \(y_j\):
b = torch.randn(N, 1, device=device, dtype=dtype)
Compare the performances of our block-sparse code with those of a dense implementation, on both CPU and GPU backends:
Note
The standard KeOps routine are already very efficient: on the GPU, speed-ups with multiscale, block-sparse schemes only start to kick on around the “20,000 points” mark as the skipped computations make up for the clustering and branching overheads.
backend = "GPU" if use_cuda else "CPU"
# GPU warm-up:
a = K @ b
start = time.time()
a_full = K @ b
end = time.time()
t_full = end - start
print(" Full convolution, {} backend: {:2.4f}s".format(backend, end - start))
start = time.time()
K.ranges = ranges_ij
a_sparse = K @ b
end = time.time()
t_sparse = end - start
print("Sparse convolution, {} backend: {:2.4f}s".format(backend, end - start))
print(
"Relative time : {:3d}% ({:3d}% including clustering), ".format(
int(100 * t_sparse / t_full), int(100 * (t_sparse + t_cluster) / t_full)
)
)
print(
"Relative error: {:3.4f}%".format(
100 * (a_sparse - a_full).abs().sum() / a_full.abs().sum()
)
)
print("")
Full convolution, GPU backend: 0.0004s
Sparse convolution, GPU backend: 0.0005s
Relative time : 122% (5627% including clustering),
Relative error: 0.2253%
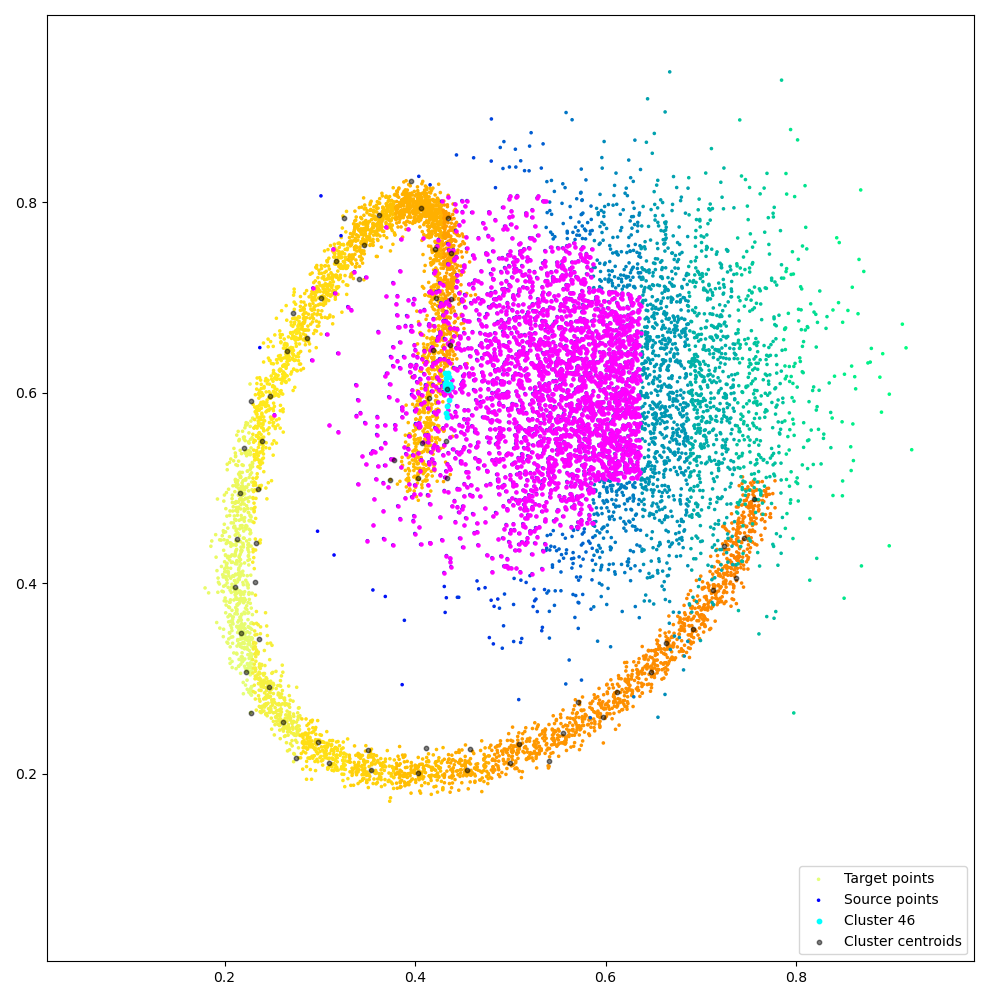
Fancy visualization: we display our coarse binary mask and highlight one of its lines, that corresponds to the cyan cluster and its magenta neighbors:
# Find the cluster centroid which is closest to the (.43,.6) point:
dist_target = ((x_centroids - torch.Tensor([0.43, 0.6]).type_as(x_centroids)) ** 2).sum(
1
)
clust_i = torch.argmin(dist_target)
if M + N <= 500000:
ranges_i, slices_j, redranges_j = ranges_ij[0:3]
start_i, end_i = ranges_i[clust_i] # Indices of the points that make up our cluster
start, end = (
slices_j[clust_i - 1],
slices_j[clust_i],
) # Ranges of the cluster's neighbors
keep = nump(keep.float())
keep[clust_i] += 2
plt.ion()
plt.matshow(keep)
plt.figure(figsize=(10, 10))
x, x_labels, x_centroids = nump(x), nump(x_labels), nump(x_centroids)
y, y_labels, y_centroids = nump(y), nump(y_labels), nump(y_centroids)
plt.scatter(
x[:, 0],
x[:, 1],
c=x_labels,
cmap=plt.cm.Wistia,
s=25 * 500 / len(x),
label="Target points",
)
plt.scatter(
y[:, 0],
y[:, 1],
c=y_labels,
cmap=plt.cm.winter,
s=25 * 500 / len(y),
label="Source points",
)
# Target clusters:
for start_j, end_j in redranges_j[start:end]:
plt.scatter(
y[start_j:end_j, 0], y[start_j:end_j, 1], c="magenta", s=50 * 500 / len(y)
)
# Source cluster:
plt.scatter(
x[start_i:end_i, 0],
x[start_i:end_i, 1],
c="cyan",
s=10,
label="Cluster {}".format(clust_i),
)
plt.scatter(
x_centroids[:, 0],
x_centroids[:, 1],
c="black",
s=10,
alpha=0.5,
label="Cluster centroids",
)
plt.legend(loc="lower right")
# sphinx_gallery_thumbnail_number = 2
plt.axis("equal")
plt.axis([0, 1, 0, 1])
plt.tight_layout()
plt.show(block=True)
Ignoring fixed y limits to fulfill fixed data aspect with adjustable data limits.
Total running time of the script: (0 minutes 0.513 seconds)